林ホビー工作研究室
|
| 【差動減速】 |
|
● 初めに。
● 31Pピン歯車作り。
● ローラー式ピン歯車。
●
|
|
【31Pピン歯車作り】 |
| トップページへ このページのトップへ |
 |
前にもやっていますが今回はかなり正確に作ってみたいと思います(と、いってもオモチャ程度ですが)。
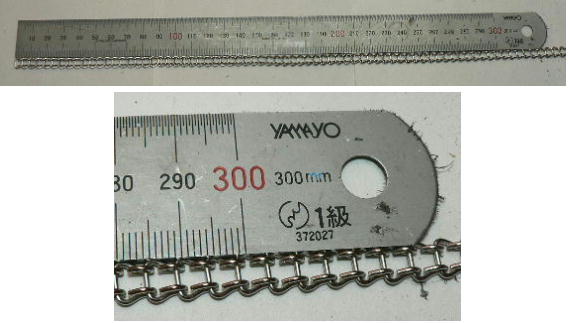
ラダーチェーンを使って31Pの分割円板を作ります。まずこのチェーンのピッチを実測します。ラダー数が63個の時、299ミリぐらいでした、円盤を作るボール紙の大きさからみて、だいたい5倍ぐらいが適当と考え、計算してみます。
まず
299÷63=4.7460・・・、4.746として
4.746×31×5=735.63
735.63÷3.14=234.277 234.277÷2=117.138
という訳でだいたい半径
117.5ミリぐらいでボール紙で円盤作ってみます。 |
 |
| これは創作工具「サークルラインカッター」です。上のバーが直径20センチぐらいまで、下のバーが直径60センチぐらいまで段ボールやボール紙、薄いベニヤ板等を円盤に切り取れます(この装置の詳細は別ページでやります) |
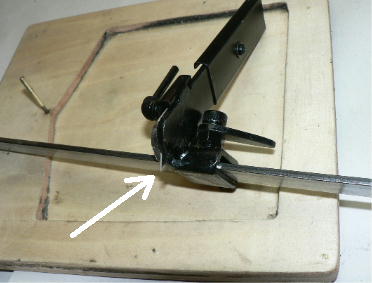 |
| 白矢印のところにカッターナイフの刃がセットされてます。中心の穴は 2ミリと3ミリが選べます。 |
 |
これは工作ベース300の「パンチャーモード」です。中央に「ドタマトンカチビット」が刺さっています。この辺の詳細は別ページで(なに、真ん中辺に3ミリの穴があいているだけです)。
ボール紙などに穴をあけるのは簡単ですが、それを定規として使うとなると問題です。縁のきれいな穴にする必要があります。直径
235ミリほどの円盤になりますと、ボール盤では奥行きが足りなくてできません、捨て板を使って電ドルというのも面倒くさい、そこで簡単に工作ベース300パンチャーというわけです。 |
 |
| こんな具合です。ボール紙は前もって仕上がりより大きめに切りだしています。 |
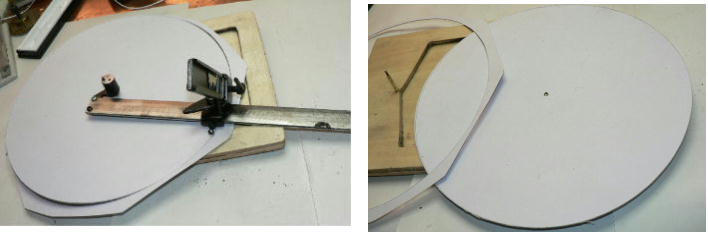 |
| 次に「サークルラインカッター」で円盤に切り取ります。ハサミでフリーハンドでも出来ますが、仕上がりの美しさといったらもう比べ物になりません(この辺の事も別ページで) |
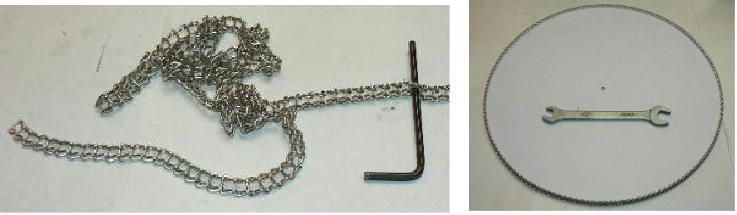 |
| 31×5倍の155コマラダーチェーンで「ワッカ」を作り、切り取った円盤の外周にはめます。残念ながらちょっぴりユルユルでした、作り直しです。
8・10ミリのスパナは大きさの比較用です(失敗は想定内です) |
 |
昨日作ったボール紙円盤より
0.5ミリほど大きく作り直しました。ラダーチェーンワッカがピッタリ入ります。外れないようにところどころテープで押えました。「手回しベース」にセットできる大きさの銅板とともに(ケガキが見えやすいように塗装しています)ボルトで固定します。
適当な三角定規とケガキ針を用意して分割ケガキスタートです。5マス飛ばしで
31ヵ所線を引きます(5マス飛ばしにより、少なくともこの段階で誤差は5分の1にはなったはず) |
 |
| 先をとがらせたセンターポンチで出来るだけ正確にクボミを付け、2ミリのキリサキで31ヵ所穴をあけます。、この穴あけでは絶対押し付けてはダメです。押し付けるとドリルキリサキがゆがんで位置がずれる可能性があります。気長にやります。 |
 |
ラダーチェーンのラダー部は直径 0.9ミリでした、 30Pのラダーチェーンスプロケット谷ー谷寸法は
44.9ミリでした、この寸法から 31Pのピン歯車全体の寸法を割り出します。
市販の30Pラダーチェーンスプロケット「谷ー谷」寸法は 44.9ミリでした、ラダー部の直径は 0.9ミリです。するとこの歯車の「実行径?」(なんか正式な呼び名あったけど忘れてしまった)は、 44.9+0.9=45.8ミリです。これから(πを 3.141として)外周長を出します。
45.8×3.141=143.8578 これを30分割
143.8578÷30=4.79526 と出ました。これに31を掛けます。
4.79526×31=148.65306 ここから直径を割り出します。
148.653063.141=47.326666
ホビー工作の観点からすれば小数点2桁以下は無意味です。CNCマシンだったら小数点以下4桁程度まで数値入力できるようですが、フリーハンドではいいとこ
0.1ミリぐらいまでの精度がやっとこでしょう、すると 31ピンの実行半径は小数点三桁以下を切り捨てて 47.32 ・・・ さらに小数点以下二桁を四捨五入して 47.3ミリと出ました。
そこで「手回しベース分割盤モード」で直径 47.3ミリの円上に31分割のくぼみを刻印します。 |
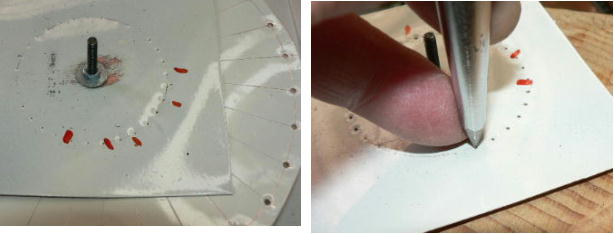 |
| 31ヵ所終わったら取り外し、真中に3ミリの穴をあけた 60×60ミリのトタン板を下に重ねてビス止めし、2枚一緒に先の尖らせたセンターポンチで改めて打撃し直します。指をあてがい慎重にやります。 |
 |
| 0.8ミリのドリルキリサキで2枚一緒に貫通穴を31ヵ所あけます。これも慎重にやります。やってみて分ったんですが、0.8ミリほどになりますと「センターポンチ」でうがったくぼみなど関係無しに下ろした位置に穴があいてしまいます。銅板の為でしょうか、くぼみに吸い込まれるようにしなければなりませんでした。 |
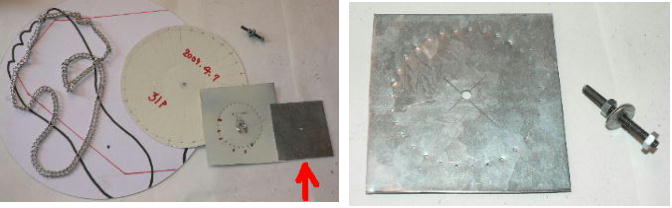 |
これでやっと31ピンの【型】が出来ました(右写真)はじめはボール紙、次に
31分割、銅板に刻印、最後にトタン板に写し取り、そして穴あけ、この「型」さえあればいつでも「31P」のピン歯車を簡単に作ることが出来ます。作動減速4つの難関のうち一つが解決しました。(このときはそう思っていた)
最後をトタン板にしたのは誘導穴が擦り減らないにです(銅板ではもたない) |
 |
| 垂直に穴あけ出来るように専用台を作りました。といっても角材に適当に空間を作っただけです(0.8ミリのキリはよく曲がる) |
 |
| 31ヵ所に釘(太さ 0.9ミリ)を打ち込むのも結構大変です。しっかり打撃できるように下の台には円の溝が掘ってあります。 |
 |
書くの忘れましたが最初に作った奴(右側)は失敗でした、スプロケットが入らなかったのです。そこで最初から作り直ししました。左の奴です。円の直径の差は
0.3ミリでした、左の奴は真中に丸棒を入れて回すと(コネまわす感じ) カタカタ
動いてゆっくりと逆回転します(原理は間違っていない)。
差動減速機は次に「ローラー式ピン歯車」に移りますが、準備のためちょっとお休みします。(4月10日記)
|
|
【初めに】 |
| トップページへ このページのトップへ |
4月5日(日)。
手作り減速機である「差動減速機」ですが、やっとアイデア出ました。と、いっても「おもちゃ程度」ですけど。
ハーモニックドライブ(ハーモニックドライブシステムズ社の意匠登録)から端を発したこのシリーズ、見積もりとってそのあまりの高額さに愕然として(だって親指大で2万円以上するんだもん、しかもモーターなし)「いやー遊びだから
1000分の1でやったれ」(つまり 20円ね)なんてバカなことを考えていて 5年、続けていれば多少は進歩するもんですね。
なんでこだわるかと言うと「ロボットの関節駆動」にはモーターを使う使わないは別として「最適」だと思っているからです。その訳は構造にあります。もっともすべてではないですけど(部位によって使い分けたい)。
筋肉には「脱力」というか「弛緩」という状態があります。これを機械で実現するのは難しい、クラッチとブレーキを一緒にしたような仕掛けは色々ありますが、みんな大きくて重い、パワーに見合った物にしなければならないし、ってなに言ってるか分からなくなったりして。
おもちゃ的に作るにしても差動減速機には四つの作るの難しい部品というか部位があります。まずは「メイン歯車の歯数+1」の外歯車の分割、たとえばメインが
30Pだったら 31Pの外歯車(差動だから)を作らなければなりません(分度器なんかでは絶対無理、製図ソフトでも出来るかな?)。
大体にしてホビー的に歯車を作るなんてそれなりの機械がなかったら無理、こうなったらもう18世紀の技でも使いますか(つまりピン歯車)。
まずは第一の難関、「メイン歯数+1の分割盤」の制作です。とりあえず31分割ですが「ラダーチェーン」を使おうと思います。1対1ではかなり誤差が出そうなので5対1の155コマでやってみようかなと思います。
|