| 【遠心スイッチで速度制御】 | ||||
| トップページへ このページのトップへ | ||||
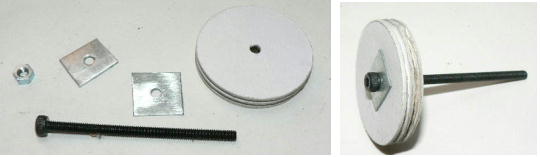
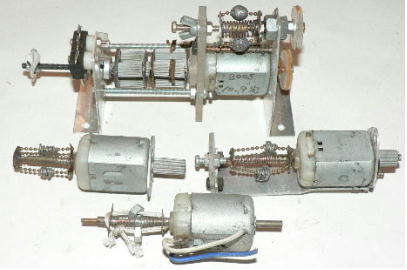 昔作った速度制御遠心スイッチの付いたモーターの一部です。電子回路とかまったくありませんので、とても簡単に速度制御できます。ただし接点の位置を変えるだけなので、プログラムによる可変は出来ません(2スピードなら出来る)。 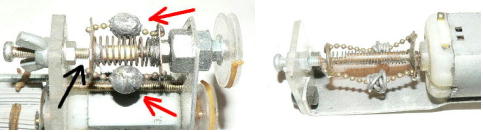 黒矢印のところが接点で、赤矢印が釣り用の鉛です。遠心力によりバネを押し縮めて接点が離れます。これによりモーターは一定の回転数を維持します(見掛け上ですが)パワーはPWMのようなパルスではなく、いきなりフィードバック(笑)なので、ものすごく力強いです(モーター直のON・OFFだと火花がかなり出ます)。 当時、蒸気機関の「ガバナー」しか頭になかったのでこのような形しか思いつきませんでした(だからこれ以上進みませんでした、作るのが面倒くさい)。 少し丈夫に作って「卓上ボール盤」や「ベビーサンダー」でも実験しました。ボール盤はかなりうまくいったのですが、(1秒間2回転ぐらいまで成功)ベビーサンダーはガクガクしました。すごい火花、何しろ直制御、駆動方法の違いのせいもあります。  今回どういう訳か急に「簡単な仕掛け」で作る方法を思いついたので作ります。この写真はモーターシャフトに直に3ミリの長ネジを半田付けした物です。2ミリのモーターシャフトに3ミリの真鍮パイプを入れ、さらに4ミリの真鍮パイプを入れて、3ミリの長ネジを入れ、半田付けしています。この方法だと割と芯が出ます。  アクリルでもよかったんですが、近くに転がっていたのでABS樹脂で絶縁部分を作りました。最低1本は独立した信号を取り出す必要があります。  次に銅板と銅パイプで集電?部分を半田付けで作ります。  組み立ててみたら中心が全然合ってなーい、しょうがないので黒矢印の穴をひろげました。  とりあえず8割方完成しました。 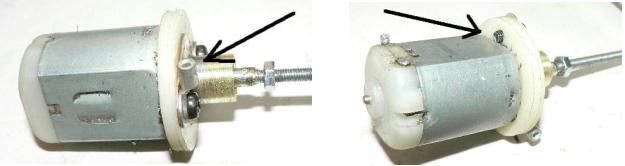 左写真黒矢印は信号取り出し用圧着端子です。ところで右写真、ビス先端がモーターに接触してしまいました。ちゃんと離したつもりだったのに腕の悪さの証明です。ビスを短くする必要があります。 【遠心スイッチで速度制御】の②。  仕事の関係で2・3日工作出来なくなりそうですが、ここでお休みすると皆様ちょっとストレス溜まるかも知れないので、急いで少しだけ工作します。 0.5ミリの銅板です。本当は「燐青銅」使いたいのですが、(接点だから最低は)探し出すのに時間がかかりそうなので、(無いかもしれないし、とりあえず銅板で)、真中に3ミリの穴をあけ、コの字に曲げます。  10ミリのパイプに接触する位置で固定します。ちょっとひどい構造ですが一応「接点、つまりブラシ」になります(頬をなでる感じ)。 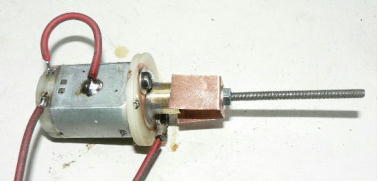 とりあえず簡単に配線します。構造を簡単にするためにモーター自体も回路の一部として使います(本当はいけないんですけど「ホビー」ですから)。  実験は成功しました。大体ですが、こんなんでも約半分ぐらいの速度に抑えられました。その後「遠心力が足りない」ようなので、半田とかビスとか「重し」として半田付けしました。これにより3分の1程度まで速度は落ちたのですが、いつの間にか写真のようにハの字になってしまいました。 「接点はただの銅板だしショウガナイナー」と思ったのですが、「待てよ、なんで2ヵ所とも開いたんだー」、おかしいじゃないか・・・レレレッ 接点開いてるのに「回ってるーーー」 (止まらねー)。 いくらなんでもこれはおかしい、つくづくあちこち眺めました。 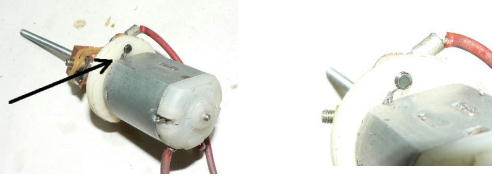 なんと、「例のビスを短くし、ショートを無くして」組み直したのですが、その時モーターの磁力でその辺の鉄片か何かを吸いつけたらしく、モーター本体まで「ブリッジ」が出来ていたのです。モーター本体も回路の一部として使っていますから、接点を通さずにフル回転してしまった訳でした(それも時々、赤く光ったので気がついた)。 時間が限られると、こういうミスは起こりやすくなります。そういう訳で完成はちょっと後日になります。でも夢は膨らむーーー。 なんとなくですが、昔・釣りのオモリを使って作った「ガバナー方式」の方が、低速運転時「力強い」ような気がします。その辺もじっくり考察したいと思います。 【遠心スイッチで速度制御、の③】  接点の部分があまりにもチャッチいのでもう少し真面目に作ります。まず4ミリの真鍮パイプを10ミリに切ります。1個で良いんですが予備です。それから銅板でコの字を作ります。これも余分に作りました。3ミリ幅の木片をあてがって曲げます。  その真鍮パイプとコの字の銅板を並べて半田付けします。  こんなのを作ります。ガバナーの「ベース」になります(1個で良いんですが)。  そのベースに重りの中心になる穴をあけます。  ガバナー部分です。完成させるのが目的ですからただの3ミリの平鉄です。ここは設計していませんから適当にあちこち修正しながら切り取っていきます。実は最終段階の形が全然わかっていないので説明のしようがありません(口で言うより手のほが早い)。  こんなん出来ました。ガバナーの本質をとらえた形にしたかったのですが、とりあえず実験したいので本能の赴くまでです(と、いうか、やっつけ仕事)。  まずはベース部分をネジ止めします。 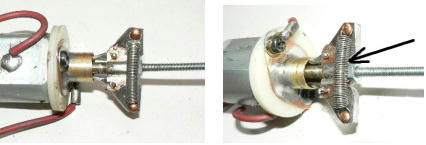 そして組み込みました。問題はここからです。ガバナーを引きとめておく装置というか引っ張るというかスプリングの取り付け方法を考えていませんでした、黒矢印のように付けたんですが、いかにも「取ってつけた」ような案配です。片側だしバランス悪そう、このあと「とんでもない事」に(このスプリングが吹っ飛んだんです)。 【完成】 昨日の奴は接点通さないで全力で回したところ、スプリングが一瞬で吹っ飛んでしまいました。メガネをかけていてよかったです(顔面にぶつかった)そこできちんとバランスをとれると思われる構造にしました。  一応完成しました。モーターの側面から30ミリも出っ張ってしまいました。昔の「ガバナー式」の時は50ミリ以上出っ張っていましたから、それに比べれば短くなりましたが20ミリ以下に押さえたいところです。 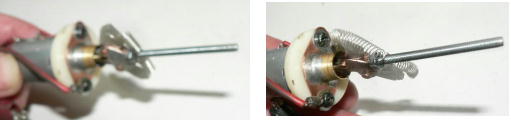 早速実験、動画の載せ方まだ分からないので静止画でスミマセン、回転中の丁度よい角度の写真は難しいです。 回転計つないでいないので正確にはわかりませんが、大体無負荷全力回転の10分の1ぐらいの回転です。なかなか力強いです。これは大成功だと思います。(その辺の訳は最後に) 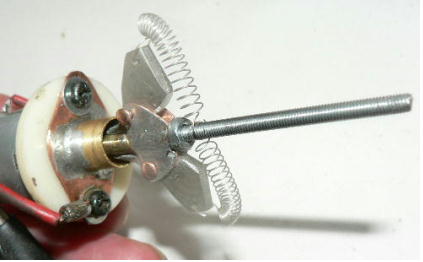 ところで接点を通さないで無負荷運転してみたところ、写真のようにスプリングが思いっきりのびてしまいました(これは回転中の写真です。止まればスプリングは元に戻ります)ある程度は予想していましたがこんなにのびるとは思いませんでした、「遠心力恐るべし」です。のびる範囲を制限する仕掛けが必要です。 「こんな仕掛けなんかやってないでPWM制御すればいいじゃないか」と、思われるでしょうが「全くそのとおり」です。でもその為に回路作るの嫌です。 これから位置制御をやっていく訳ですが、サーボモーターのようなパルス制御ではなく(実はよく分からない・・・いや分かるけど、筋肉としてちょっとちがう気がする)回転数制御をしようとしています。全力で回転しているのに「位置に来たからピタッと止める」なんて無理、だから停止位置の手前で回転を落とそうと言うわけです。また行き過ぎても遅ければバックも簡単という訳です。 |
||||
|
|
||||
| 【開閉器 2型改】 | ||||
| トップページへ このページのトップへ | ||||
 Wプーリーで作ってみます。ここで問題になるのはプーリーが段ボール製ということです。ボルトナットで締め付けると「めり込んで」しまいます。でもその辺はあとで考えることにして簡単な座金(ただのトタン板)でごまかすことにします。 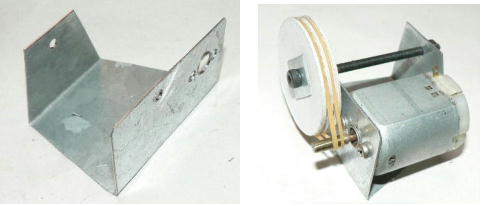 ブラケットも手抜きで簡単に作りました。スラストベアリングも無しです(Wの輪ゴムがカッコイイと思うのは私だけ?)。 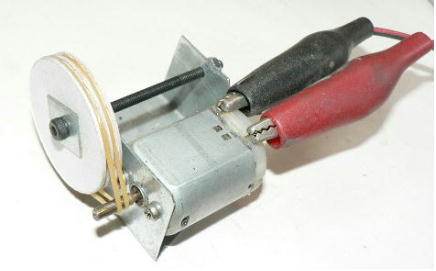 一番小さい輪ゴムを2本掛けて回転実験、回転中ボルトを無理やり指先で止めようとして、軽く火傷をしてしまいました。ペンチで挟んだらモーターが止まりました。モーター軸には3ミリの真鍮パイプが半田付けされていますから 15対1の減速です(モーターシャフトのとこでスリップしないのがうれしい)。  長ネジから出力を取り出すナット?です。こういうの作るの苦手なのでちょっと寸法狂っていますが無視です。 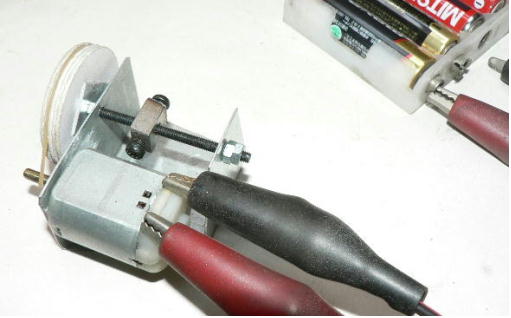 改めて回転実験、怪我しないように輪ゴムはちょっと大きめの物1本掛けです。それから電圧も半分です。ストロークは長ネジの関係で 30ミリです。こんなブラケットでは推力実験が出来ませんが、ちゃんと作れば多分8Kgぐらいは出ると思います。もっとも3ミリボルトがすぐにイカれると思いますが(昔、こんな感じの装置で持ち上げ実験をしています)。  左が今回作った奴、少し使えそうになってきました。右はちょっとチャッチかった。 |
||||
|
|
||||
| 【W・トリプル・クオート輪ゴムプーリー】 | ||||
| トップページへ このページのトップへ | ||||
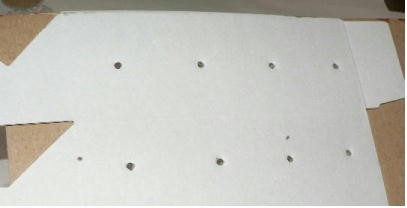 まず素材に (これは菓子箱です) 3ミリの穴をあけておきます。 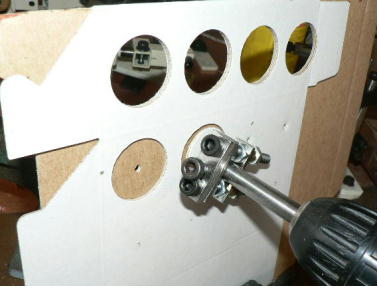 そして 「円月空中殺法」 (笑)こんなこと初めてやりましたがこれは使える、いろんな「理」にかなってる、(と、思う)刃もあまり痛まないようだし何より手軽です(掛声かけてやると楽しい、でも危ないので気が抜けません)。 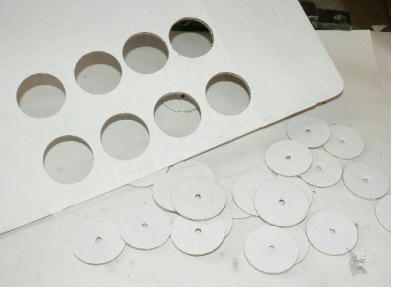 5分もかからずに20枚ほど切りぬけました。 ロボットの関節に輪ゴムプーリーだなんて「アンタ馬鹿じゃないの」なんて女房の口癖以外にも多数聞こえてきそうですがそうです、私もそう思います。 しかし「やってみなくちゃ分からない」って事もあるんじゃないかなぁ、特にモーターからの1段目なんてそんなにトルクとかないし、それにプーリー減速は意外と「大減速」が可能です。問題はあまりに非力な事、それじゃあ複数段にして試してみようかな?、というのが今回の目的です。 輪ゴムの幅の広いの使えば ? とも思いますが、あまり種類がないし結構高い、それに複数段にすれば「なんか格好良い」ような気がします。 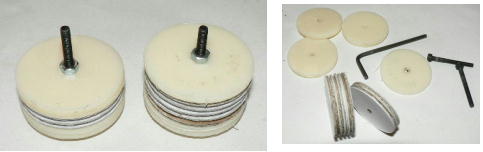 そこで30ミリと34ミリの円盤を作って張り合わせました。上下はABS樹脂です。こいつは並の接着剤ではくっつかないので押えるのに好都合です。とりあえずWとクオートを作ってみました。  接着剤に木工ボンドを使ったので乾くまで休みです。接着剤がはみ出て溝が埋まってしまうので、溝の幅と同じ太さの荷造り紐でさらってます。 |
||||
|
|
||||
| 【開閉器 2型】 | ||||
| トップページへ このページのトップへ | ||||
 モーター軸直結ではなく、プーリーを介して減速し、ネジ送り開閉器の模型を作ります。ついでに全長も短くします。6ミリの穴は事務用パンチャーです(ブラケットの穴あけ、失敗してます)。  わざわざ使う必要とかないんですが、厚さが1ミリということで、牛乳瓶のふたでプーリーとBB弾ホルダー?を作りました。輪ゴムの断面って1ミリ四方の正方形って知っていましたぁ、(普通の輪ゴム)私はつくづく見るまで知りませんでした(丸いと思ってた)。  完成、プーリーはBB弾スラストベアリング結合、モーターシャフトには網戸の押さえゴムが入っています。  こちらはモーターシャフト(2ミリ)直です。15対1になります。 輪ゴム1本掛けとはいえ、15対1ともなりますと、出力は指ではおさえきれません、BB弾のスラスト効果が発揮されてます。ブラケット(L金具)の寸取りに失敗してなんだか小学生の工作みたいになってしまいましたが、(私の腕ではこれで目一杯)全体としてはまずまずでしょうか(重さ70グラム、材料費モーター入れて130円)。 これは「つま先」の駆動に使おうかなと思っています。つまりロボット製作第一歩という訳です。ここは「腰」の動きに連動して「開」か「閉」のどちらかなので、ややこしい制御とか不要です。直立静止→閉、腰+ →閉、腰−→開です(+は前方移動、マイナスは後方移動を表します・リン式機械人形定義)。 |
||||
|
|
||||
| 【開閉器 1型】 | ||||
| トップページへ このページのトップへ | ||||
 モーターの力をめいっぱい引き出すには歯車など使わずにモーター直接が一番良いと思うんですが、速度的にそうはいきません、そこで単純にモーター軸から長ネジを回し、ナットで直線運動を取り出したらどうかな ? と思って長ネジとシャフトの「接続方法」をいろいろ探ってみました。 ところがどっこい、そう単純ではなかった、どうしても「芯」がブレてしまうのです。モーターシャフトは 2ミリ、長ネジは 3ミリよりちょっと細い、この「ちょっと」が難しい(旋盤でそれなりのを作れば良いのでしょうが)。  それでも一応形にしたのがこれ、ICドライバと右限・左限リミットスイッチ付きです。それなり動きますがどうにも気に食わない、1個で作るのやめちゃいました(^_^)。  その辺の事情は置いといて本日はこれ、長ネジとナットの関係です。シリンダーみたいにしたくていろいろ考えました。  4ミリのアルミパイプ(真鍮パイプでも可)にキャップスクリューボルトの長いのを油を付けて挿入し、端っこをひっぱたいてつぶします。するとアルミパイプの中に「タップが切れるはず」。  そしたら取り外します。始めはきついけど、すぐに程よくなります。右の写真ルーペ使って中の様子を撮ろうとしたんですがうまくいきませんでした。  必要ないとはおもうんですが、タップを入れてみました。ここは「スパイラルタップ」でないとだめのようです。  昔作った長ネジ付きモーターで回してみました。一応順調です。しかし回転が速すぎて扱いづらいです。次はもっと実用的な奴を作ります。 【てんぞうネジ ? 】 たしか「てんぞうタップ」(呼び方ちがうのかな?、変換されない)というのがあって、薄い板なんかにタップネジを切るというか作る工具があるらしいんですが、それの逆バージョンみたいなことを思いついたのでUPします(よく分からないんですが、タップを切るのではなく「無理やり」ネジ山を作るらしいです)。  やってることは簡単です。例によって4ミリのアルミパイプに3ミリの長ネジを入れ、電気ドリルにくわえます。ネジ山を作りたいところに「簡易圧着ペンチの丁度好さそうなところを使って挟み、油をたっぷり付けて電ドルを回しながら「圧縮」していきます。それだけ。 あんまり力を入れるとちぎれてしまいます。今思いついたんですが、ミニ四駆のベアリングを3個使うと良いかもしれない、でもこの為だけに買うのはいやだな。(笑)  上が昨日作った不細工な奴、下がこの手で作ったものです。見るからにスマートです。  並べてみると一目瞭然です。 |
||||
|
|
||||
| 【ロボットの躯体考】 | ||||
| トップページへ このページのトップへ | ||||
 おなじみ家庭用ラップの芯です。これって捨てるしかない物ですが、私って「捨てられない―――」、ついつい取っておいたりするんですが最後にはやっぱり捨ててしまう。(笑) ついに活躍の時がきました。ロボットの骨組どうやって作ろうかと悩んでいたんですが、このラップの芯と薄いベニヤ板で、軽くて丈夫な骨組が作れます。 この組み合わせで作った躯体をねじり壊そうとすると、「持ちこたえるか破壊されるか」のどちらかです。中間の「少しねじれる」とかはありません、無理やりねじれば「かなり抵抗」した後、分解します。ガラスかセトモノのようです(つまりネジレとかない、でも程度の問題ですけど)。 んで写真、大汗かきながら40ミリ60ミリ80ミリに輪切りにしました(寸法いくつで作ったら良いのかわからない)もう体が危険信号を発しているようです。 かなり続きます。 |
||||
|
|
||||
| 【事務用品のパンチャーとBB弾で、ホビー的ベアリング】 | ||||
| トップページへ このページのトップへ | ||||
ふと、「事務用品のパンチャーのあける穴は 6ミリではないか ? 」と思いつきました(なんとなくは思っていましたが測ったことはありませんでした)。 このパンチャー、昔の奴は鋳物製らしく結構重たいです。最近の奴は板金折り曲げ(プレス?)製で、かなり軽いし小さいです。右の写真は模型空気銃用のBB弾です。黄色っぽいのは価格が安いやつ、白が高級品?です。見掛け上違いがわかりません、なんでも野外で使うと土に還るとかかえらないとか。  工作に使うため強度試験をしました。といってもペンチで挟んでつぶそうとしただけです。大体100Kgぐらいはもちそうなのでオモチャ的機械要素(笑)としては十分のようです。 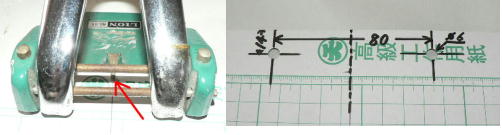 この事務用品のパンチャーには中央に「指針」があります(赤矢印)工作用紙を入れて穴あけし、寸法を測ったところ右写真のような寸法だとわかりました(みんな同じ ? )。  BB弾はノギスで測ったところ「正確に直径6ミリ」でした。 前にもBB弾を使った工作はしていますが、きちんと測ったのは初めてです。さすがは兵隊さんごっこが出来る弾丸、おもちゃとはいえ凄い精度です。  とりあえず牛乳瓶の蓋に穴をあけ、BB弾を入れてみました(パンチャーには少し油をやった方が良さそうです)。 これでおもちゃ的「スラストベアリング」が作れます。そのほか実用的な「中華料理の回転テーブル」も作れると思います。先ほどのペンチ実験結果でも推測できるように「結構重たいテレビの回転テーブル」も制作可能でしょう(衝撃さえなければ1個で100Kgぐらい耐えるし)。 今まではベアリング屋さんで買ってた 3ミリの鋼球使ってたんですが、あまり一般的(ホビー工作的に)でないような気がして、これからはこのBB弾を機械人形のベアリング構造の玉に正式採用したいと思います。とりあえず「糸巻き戦車」みたいな関節補助バネみたいな物(ひざ関節)のスラスト軸受けに使おうと思います。体重(重量)軽減の為の補てん装置みたいなものです。 この項、続きます。 |
||||
|
|
||||
| 【リミットスイッチ考】 | ||||
| トップページへ このページのトップへ | ||||
動くものを制御するには何かしらの「制限装置」が必要です。電動の場合、単純に ON-OFFするのがリミットスイッチ、この場合モーターへの電力供給を操作する訳ですが、その場合直接するのと何か別の素子(リレーとか電磁開閉器・パワーIC等)を介して行う、という二通りあります。 ラジコンサーボやロボットサーボ、ステッピングモーター等の制御は比例制御やフィードバック、パルスとか高級になります。私は生半可な知識しか無いので敷居が高いです。 そこで単純なリミットスイッチでやろうと思うのですが、こちらもそれなりメンドイ。(^_^;)  東京秋葉原の千石通商で購入したタクトスイッチです。1個10円でした、足がプリント基板の穴にジャストフィットです。店員さんに「B接点ありませんか?」と尋ねたら笑われてしまいました。10mAぐらいしか流せないそうです(B接点あってもよさそうな気がするんですけどね)。  こちらはいわゆる小型マイクロスイッチというやつです。A接点・B接点・コモンが出ています。ローラー無しと付きです。これは200mAまでぐらいだそうです。 接点には「チャタリング」というのがあるそうです。私は何十アンペアの世界にいましたので、まったく関係ありませんでした、しかしパワーICとか使おうとすると「勉強」しなくてはなりません。 ところで「チャタリング」ってA接点で発生するものだと思います。B接点でも発生するのかしら ? 、オシロで確認しようと思いましたが 「つ 使い方忘れたーーー」(40年は触っていない)。 どなたか教えてください。 2009.7.22 雨宿りの軒下掲示板 (la1cvf様主催、私は常連) チャッタリング 投稿者:エフ 投稿日:2009年 7月22日(水)17時22分54秒
|
||||
| 貴重なご助言ありがとうございました。これからもどうぞよろしくお願いいたします。m(_
_)m この項、続きます。 |
||||
|
|
||||
| 【各関節の動力源考】 | ||||
| トップページへ このページのトップへ | ||||
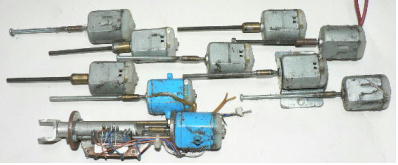
最新の情報によればついにトルク「67Kg」以上のサーボが出現、しかも重さ100g以下とか、お値段は二万円前後だったかな ? 、スピードだって 60°で 0.2秒かからないらしい、まったくすごい事になってます。 私と言えば相変わらずアムロのオヤジ(ガンダム・低酸素症)よろしくクズ鉄屋あさりでこんなの買ってきました。  1台1000円でした、(東京秋葉原のジャンクショップで)24V毎分123回転です(ためしたら 3Vでも回った、超遅いけど)重さは 170gもあります。これでトルクは 1Kg程度、最新のサーボとは雲泥の差です。こんなんでは動きは「ナマケモノ」以下、重さはヘビー級、長所は安いのと作動音が静かなことぐらいです。  何をとち狂ったか 8個も買っちゃいました。こんなんで組んだら重くて自己崩壊しそうな気がしますが、ここんとこ道具・工具ばっかり作っていたのでちょっと遊んでみます。 たったの 8個では話になりません、ところで私考えますに「すべての関節に同じ出力のモーターを使う必要はない」と考えます(まぁ当たり前か )ですから足りないところはマブチモーターで補ってみたいと思います。片足で 7関節、両足 14関節で腰が 3関節となると合計 17関節・・・オイオイハナから実現不可能っポイ、でも基本からやってる時間無いんですよね。 ロボットを作っていらっしゃる方々のページを時間が許す限り見ています。いったい何から取り掛かったら良いのかわかりません、大体において「使うサーボモーターを決める」、「それにあったブラケットを設計して作る」、「なんとなく形が決まってくる」てな感じでしょうか、または「形を決める」、「それにあったサーボを決める」、「なんとか体裁を整える」でしょうか。 私の場合はまず「高いサーボは買わない」(買えない)、「制御の仕方が分からない」、(おバカ)「作ったことが無いのでノウハウが無い」、(経験ゼロ)という大問題があります。そのくせ「かっこいいの」とか「かわいいの」とか一丁前の願望はあります。まずは【シルエット】からいきますか(大笑)。 この項、続きます。 |
||||