7/29 (2回目)
遊びですよ。
マブチモーター(模型用)をステッピングモーターに改造しました。 戻る。 トップページに戻る。
とりあえず、ロータリー接点を自作して駆動しました。
詳細はこちらです。
7/27 (1回目)
マブチモーター(模型用)をステッピングモーターに改造します。 戻る。 トップページに戻る。
ステッピングモーターとは、位置制御が簡単に出来るモーターです。この他に色々なモーターや方法がありますが、構造としてはこれが一番簡単です。欠点は「力が弱い(重さのわりに)・重い・止まっているときも電気を食う」とかありますが、パルス電流で位置制御が出来るのが一番の魅力です。
私は30年ほど前から市販のステッピングモーターを使って、XYプロッタプリンタとかプラズマカッターのプローブを制御して鉄板を切断する装置とか、ハンコ彫りマシン(遊び)とか作ってきました。しかしどうにも面白くありません、正確に動いて当たり前、誰もほめてくれないのです。(ホビーの工作って誰もほめてくれなければ自己満足・さみしい)
話は変わって、教材用 ? ロボットアームというのがあります。私は次から次に買って作りました。残念ながら全て「時間制御」なのです。したがって電池が減ってくれば位置制御が不安定・物をつかめば重さで不安定・、これではパソコンで制御する甲斐がありません、使っているモーターが位置制御出来ればなぁといつも思っていました。
そのうちどこかで発売・・・と思っていましたがなかなか出てきません、(まともな物は別です。産業用とか)そこで私が挑戦する事にしました。(最近暇だし)(笑)
考え方。
小学校で二極モーターというものを授業で作ります。電池をつないでシャフトを好きな方にまわすとそちらに回り出すというやつです。その後、図解だけで三極モーターの原理だけやりますがこれで終わりです。マブチモーターには、130から280まで数種類のモーターがあります。このモーターは安いし、一対の電極に電池をつなぐだけで決まった方向に回り出します。三つある磁極に次々に磁励し回転させるわけですが、(めんどくさいので理屈は割愛しますが)ここで、次々に磁励しなければどうなるか・・・というのが今回のアイデアです。(つまりそこで止まってしまうはず)
そこで、磁励の切り替えを外部で出来るようにするのが今回の目的です。問題は各磁極への荷電方法です。又磁励方法も数種類考えられますが、今回はコモン線無しの3線方式です。外部に3本出さなければなりません、1本はホビーの工作と言うことでシャフトから取り出します。あとの2本はもともとの一対のブラシを改造して取り出すことにします。

回転子の集電部分を取り外したところです。
三ヶ所コイルの巻始めと終わりの部分がお分かりでしょうか。

その内の1本にリード線を付けて反対側にまわし、シャフトに巻き付けて半田付けします。

取り外したブラシ部分です。上が原型で下は折り切ったところです。
方側のみ3ミリほど延長して、ブラシの当る位置をずらします。
(工法は後ほど)

これは苦労しました。2極の集電部分です。
(特殊工具を使わないで加工出来ます。後ほど)


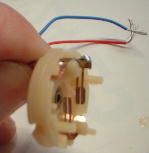
完成です。ボデイに黒いリード線が半田付けされています。
このモーターはRE-280(200円ぐらい・安い !!)
励磁方法ですが、
| / |
黒 |
赤 |
青 |
| 1 |
+ |
/ |
- |
| 2 |
/ |
+ |
- |
| 3 |
- |
+ |
/ |
| 4 |
- |
/ |
+ |
| 5 |
/ |
- |
+ |
| 6 |
+ |
- |
/ |
今回はこうなりました。
動かしてみて。
駆動用ドライバ回路を作らなければなりませんが、所定の動きをするかどうか先に確かめねばなりません、とりあえず乾電池1個で色々と通電してみました。結果は上々・60度ずつクイックイッ(こんな音はしません)と回転します。気になるトルクですが、大体の感じで 10g/cmぐらいはあるようです。もともとの適正負荷で17.7/cm(1.5v)と性能表に載っていますのでまずまずでしょう。
これからですが、最終的にはパソコン制御です。その前にロータリースイッチみたいな物を作って手で回すとその通りに回る装置(オモチャ)を作ってみます。(どなたかドライバ回路作ってくれないかな)
次回をお楽しみに。
7/27
戻る。