林メカトロ工作支援室
【トップページへ】
「機械接点ガバナー」という名称はちょっと誤解を生みましたので訂正して「遠心SW」(遠心スイッチ)と呼称いたします。私が採用したやり方は機械的な物です。これは「交流コンデンサーモートル」に内蔵されている遠心スイッチと同じ働きをします。(目的は違います)直流モーターのスピードコントロール法には色々な方法があります。一番良いのは正帰還(フイードバック)をかけるやり方です。
電子回路ですとかなり効率よく実現出来ますが、製作とか値段とか調整とかなかなか面倒です。同じく電子回路ではPWM制御と言うのがあります。これもただパルス幅(デューティ比)を変える単純なものから正帰還をかける高級な物まであります。
ここで、なぜ速度を変える必要(ただ回すならそれなりの減速比で良い)があるかと言いますと、「二足歩行においては各関節の速度が皆同じでは具合が悪いのでは」と考えたからです。コマーシャルを見ますと最近のサーボは「移動速度も指定出来る」と言うのがありました。私にはそんなの到底無理、そこでせめて2スピードに選択出来る物と考えました。
ラジコンバギーで抵抗を使ったコントロール装置というのがあります。見てるとステイック操作でかなり微妙なコントロールも出来るようです。ただ熱で電力を無駄にしているようなので(最近はどうかな?)もったいない、そこで電子回路が必要ないPWM?として「遠心スイッチ」を思いついたわけです。なに書いてるか分からなくなりそうですが、早い話【1秒間1回転というスロースピードで回すことが出来るけど、1秒間たとえば10回転でも回すことが出来る】という物を作りたいのです。
遅い回転の時、トルクが落ちたんじゃ意味がありません、(単純なPWMは極端に落ちる・やってみれば分かる)まあ力説してもしょうがない、って なーーーに書いてんだか。 |
カクカク
【リンサーボ】
2005.10.7より
マブチモーターの軸を両側に出す
|
| 今まではその場所に合わせて駆動装置を作れば良いと思っていましたが、やっぱりチャンとした基本(見本?)が無いと失敗ばかりするような気がしてきました。そこで今まで(1年間)作りまくってきた経験を生かして【リンサーボ】というのを作ってみます。バーニング宮田様の「俺サーボ」とは大学教授と保育園児ぐらいの差がありますが、多少利点もあります。まず「安い」、それから構造簡単なので「小学生の皆さんでも理解出来る」、あと制御もマイコン使わなくても出来るっポイです。 |

まずはこんな加工から。 |
「遊星フニフニタイプⅠ」を2段使って 16:1 に減速し、出力軸は 3*0.5ミリネジにして「ネジ送り」でも「ウオームギヤモドキ」でも使えるようにします。「機械接点ガバナ」を装着し、「低速・高速」の2スピードにします。それから「マイクロスイッチ」を取り付けて1回転ごとのセンサーとします。(光電にするのは後にします。理由は専用の電子回路が必要になるからです)
以上の構造を構築するにはマブチモーターの軸が両側に出ていると便利です。(片側でも可)そこでまず軸の加工からスタートです。 |

使う工具類。 |
| 金敷(乗っているのがモーター) 12ミリのボックスレンチ 金槌 コンビネーションプライヤー小かペンチ ピンセット 2ミリぐらいのキリサキを付けたピンバイス ラジオペンチ それから出来ればカッターマット 以上です。 |
  |
| 爪をおこします。模型用マブチモーターの場合は簡単ですが民生用となるとちょっと大変です。先の尖った棒程度ではまず「歯が立ちません」、そこで2ミリぐらいのキリサキを付けたピンバイスで根本を1ミリほど掘り起こします。そしてラジオペンチ等で爪をおこします。(すべってケガしやすいです) |
 
出力軸側を台に押しつけ、おしりの部分を持ち上げてピンセットでブラシを上手くずらして後ろ部分をはずします。

磁石部分はきれいなところにしまっておきます。(鉄粉等付かないように)
   |
| 出力軸側にはまっている真鍮製のストッパーをプライヤー等で4ミリほどずらします。そして12ミリのボックスに乗せ、カナヅチで軸を叩き「回転子鉄心」をずらします。1度にやるとブラシの電極部分が取り残されてリード線が切れたり位置がずれたりしますから調整しながら加工します。(12ミリのボックスレンチが寸法的に丁度良いです) |
  |
| ピンセット等でブラシを広げながらはめ込みます。(外からも出来るようになっていますが割愛します)そして写真のようにしっかり軸を挟んではめ込みます。磁力が強いのでこのようにしないとブラシを痛めます。 |

マイナスドライバーなどで爪を戻します。作業完了。 |
| わざわざHPにUPするほどのネタではないんですが、昔これやるときケガしたし構造飲み込めないうちは結構手こずって何台かダメにしたので多少参考になればとUPしました。 |
  |
| 3ミリ(内径2ミリ)の銅パイプ(真鍮パイプがなかった)をハンダ付けして軸を延長します。加工前と加工後です。 |
次はブラケットと機械接点ガバナーです。
|
林メカトロ工作支援室
【トップページへ】
カクカク
【リンサーボ】
(2005.10.7より) 2005.10.12
予定と進行状態
機械接点ガバナ遠心SW取り付け
  
|
| 工作ベース300を使ってブラケット作り、まずはケガキと切断・3ミリの穴あけ、次は「絶チルパンチャー」で6ミリの穴あけ、そして工作ベース300で折り曲げっと。(これらがなくとも出来ますが、あると全然ストレスないです。この辺は別の機会に) |
出来ました。「初号機」なのでちょっとゴツゴツ。(大きいし)

ちょっと仮組。
  |
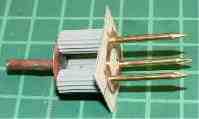
ガバナー遠心SWの重りに「釣りの重り」採用、(新しい発見あり !! )最初は失敗して電池つないだトタン吹っ飛びました。(理由はほら釣り糸に付けるつもりでやったから)でもって特性を考えてやり直し、ところでガバナー重りってなかなか難しいです。リターンスプリングと重りと回転の遠心力と「接点圧力」のバランスがぁーーー。(先生方なら数値を出せると思いますが私は無理)
2005.10.11
なるほど、磯釣りにも使えそうな「鉛の重り」を使ったモンで「こりゃーどー見てもモーターのパワーを落とす抵抗にしか見えない」や、いやその辺にあった押バネが強いのしかなかったので必然的にこーなっちゃったんですよね、それにまだドライバICとか使ってなくて「直接モーターの電流ON
OFF」なもんでゴツくないと接触不良でモーターのパワーも落ちちゃう。(しかし、久しぶりの臭いだ)
|
 |
| 適当なスプリンク、適当な重り、で、テストしたところ、なかなかの低速運転が可能でした。(大体1秒間30回転ぐらい) |
次は「遊星フニフニタイプⅠ」を二段使った減速機構部分です。
二段で 16:1 に減速します。新たな工具は半田コテぐらいです。
|
林メカトロ工作支援室
【トップページへ】
カクカク
【リンサーボ】
(2005.10.7より) 2005.10.12
予定と進行状態
遊星フニフニタイプⅠ取り付け

こーゆうのを作ります。


アルミサッシの網戸の押さえゴムです。 6.8ミリの物を使います。

網戸の押さえゴムを使おうと思ったのはホームセンターの網戸コーナーでゴム見本の切れ端を見たときです。断面がどー見ても「ピニオンギヤ」に見えたのです。昔ピニオンを秋葉原に買いに行ったとき、店の人に「今在庫ない・当分仕入れるつもり無い」(店の名は伏す、今はどっさり置いてやんの)(ムカッ)と、言われていたのです。
それ以来意地でも買うもんかっ、と思っていたところ「これ」です。モーター軸に入れたところですがどう見てもピニオンギヤでしょう、これ以来私は市販のギヤを買わなくなったのでした、もしあの時ピニオンが手に入っていたらこういうことはやらなかったかも。
|
  |
材料は「 0.3ミリ厚ぐらいの銅板」「太さ2ミリの真鍮釘」「直径3ミリの銅パイプ」です。「惑星ギヤの中間子軸と次段の太陽ギヤ軸」です。網戸のゴムは「公称
6.8ミリ」となっていますがギザギザをかみ合わせて軸間半径を測ったところ 6.5ミリでした、そこで「6.55ミリ」で3個所の位置を決めました。銅板の8ミリの穴あけは手こずりました。どうにも上手くあかないのです。彫刻刀の半丸で叩いて抜き、シャーシリーマーで仕上げました。(後で分かったのですが、
6.55ミリではきついです)
偶然かもしれませんが2ミリの真鍮釘は銅パイプに少しきつめに入りました。ペーストを塗ってから打ち込み・ハンダ付けです。バッチリの仕上がりです。 |
   |
| 惑星ギヤ(のつもりの押さえゴム)がきつくならないように工作用紙を挟みます。切れ目を入れるのを忘れて後で取るのが大変でした、右の写真のアルミパイプはハンダ付けの最中に浮き上がらないように押さえています。 |

一段目遊星子完成。
|
二段目遊星子もはめたところです。二段目を作っている写真がどこかに行っちゃいました。一段目とほとんど同じです。違うところは
1.6ミリの鉄板で作った円盤にネジを切り、3ミリの長ネジを取り付けてからハンダ付けした物に、遊星ギヤ(のつもりの網戸の押さえゴム)を取り付けたという点です。
半径を 6.55ミリにしたのは失敗でした、6.65ミリか 6.7ミリにすべきでした、やり直しイヤなので今回は太陽ギヤ(のつもりの)の外周を少し削りました。
次はスラストベアリング機構です。このような減速機の出力軸の場合、軸の前後のガタは致命的な欠陥となります。このガタをなくすには色々な方法がありますが、ある程度軸の直角性も期待出来る「手作りスラストベアリング機構」を採用します。
|
オマケ
8ミリ用「絶対正確セレブパンチャー改」を作りました。
かなり改良入って使いやすくなりました。

セレブにドタマトンカチは似合いません。

打ち抜きカスを取りやすくするため上下の板の寸法を変えました。
  
作業は実に簡単。
 |
| 0.3ミリの銅板に8ミリ穴を抜いたところです。この方式の元々のアイデアは「はるか昔(40年以上前)懐かしの真空管時代」に使っていた「シャーシパンチ」です。(まだ現役・昔の工具は丈夫だ)シャーシパンチの下穴は10ミリですが、私は3ミリにしてみました。(このあいだ久しぶりに秋葉に行ったとき覗いたらまだ売ってた、箱がプラスチックになっただけで構造おんなじ・オドロキ) |
|
ところで更に改良案浮上です。後日に。
|
林メカトロ工作支援室
【トップページへ】
カクカク
【リンサーボ】
(2005.10.7より) 2005.10.12
予定と進行状態
スラストベアリンク取り付け

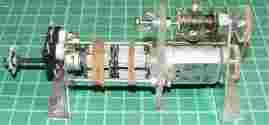
完成、横から見たところです。 |
今回の出力は「ネジ送り」か「ウオームギヤモドキ」です。このような出力の場合、「軸方向」のガタがあっては精密な動作は出来ません、(平ギヤではこの方向は多少許される)負荷が小さい場合は色々な方法がありますが今回のようにモロに負荷がかかる場合は効率から言ってやっぱりスラストベアリングが一番です。(打撃・衝撃動作での不都合はメンテで)
市販の物はしっかりした造りで重いので「鋼球」のほかは手作りにします。 |

これで前後1セット、よく見たら鋼球が1個足りない。 |
軸径は3ミリです。鋼球も3ミリを使えば内径9ミリの円筒を使えば6個保持出来ます。そこで外径10ミリのアルミパイプを輪切りにして使います。アルミパイプにした理由は「軽い・安い・切るの簡単・購入しやすい」という点です。鋼球が転げ落ちないようにするだけですからそんなに力もかからないのでアルミで十分です。
輪切りの幅は2ミリ以上3ミリ以下の間なら適当です。(3ミリ丁度はマズイです。当たるから)それからスラスト力がかかるので取り付け部分がアルミ板の場合は鋼球がめり込まないようにするためと落下しないように鉄製平ワッシャが必要です。これはワッカも落ちないようにするために最低直径10ミリは必要です。5ミリ用平ワッシャで代用出来ますがちょっとみっともないです。別に円でなくても(八角でもOK)良いのでトタン板などで作ります。(写真の物は【逆ビットパンチャー】で作りました。このかたちで打ち出せます) |
    |
| まず 平ワッシャ ワッカ 鋼球 平ワッシャと順に組み込み、ブラケットを通して更に 平ワッシャ ワッカ 鋼球 平ワッシャと入れていきます。最後にダブルナットで止めます。ダブルナットを締めるときに「ゆるすぎず・きつすぎず」となるよう軸を回して確認しながら調整します。最後に556等をチョッピリ吹き付けておきます。この構造は驚くべき独立性を発揮しますので是非お試し下さい、独立性・・・なんて変な言葉ですが、実感的にピッタリの言葉のような気がして。(実践して始めて分かるって事かも) |
 |
軸受けが出来たら早速回してみなくっちゃ・・・ゲゲ うごかねー っ 、「かみ合わせがきついんだわ」このあと太陽ギヤ(のつもりのゴム)の外周をちょっと削ってそれからその辺の輪ゴムを惑星軌道に適当に引っかけ、改めて電池をつないだら回りました。
出力軸の回転数はガバナを働かせると1秒間に2回転ほどでした、(可変出来ます)、直結だと1秒間7回転ぐらいでした、後で回転計つないで計測してみます。電池は9ボルトです。定格の75%ですね、漫画「機動警察パトレイパー」の「グリフォン」が搭載している「アシュラ・システム」とかモードやりたい、その時は15ボルト掛けるつもり。(モーターブラシがカーボンなので短時間なら可だと思う?) |
 |
気がせくので惑星軌道替わりに適当に輪ゴムを引っかけましたが、ここも「ヤスリアーマー」という性能を大幅にアップさせることが出来る(そう思っているだけかも)部品の構想があります。ま、性能UPはおいといて次は最終段のセンサーです。光学式とかポテンショメーターとかありますが、とりあえずは自己完結方式にするため「カクカクリミットスイッチ」方式でやります。(物が出来れば性能UPはいつでも出来・・・ 声が小さくなったりして)
自己完結方式とは外部の制御装置(マイコン・PIC等)が無くともある程度動く・・・というような意味です。(ピクピクとか)
今回の「リンサーボ」は体重移動のような「ちょっとしか動かないが、ある程度パワーも必要」、それに「精密さはもっと必要」というような部分の駆動を想定しています。
|
(勿論市販のギヤとか使えば性能も上がるし大きさも今の3分の1ぐらいになります。これは遊びです)
林メカトロ工作支援室
【トップページへ】
カクカク
【リンサーボ】
(2005.10.7より) 2005.10.12
予定と進行状態
マイクロスイッチ取り付け
2005.10.11
|
| いやこんなのUPするほどの事でもありませんでした、予定に入れちゃったので一応載せますけど。 |
   |
| スイッチを押す「カム」ですが、よく考えたら1回転で一個所という必要も無いような気がしてきました。どちらにしても近い将来光学系になりますのでチャチャっとやっちゃいます。 |
 
よく考えたら内側でも良かったんですよね。
 |
| モーター軸を両側に出す・遠心スイッチを付ける・遊星フニフニタイプⅠを二段付ける・スラストベアリングを作る・マイクロスイッチを取り付ける・・・で完成しました。【初号機】です。110グラムあります。形はこれから決めます。見本があると簡単に次の変形が想像出来ます。(もうすでに平べったい奴が設計完了)ところで「網戸のゴム」の使い方間違っちゃいました。(一段目の方が長い)設計では 16:1の予定でしたが 15:1になりました。太陽のゴムが3ミリの銅パイプに無理矢理はめたため「少し太くなった」ようです。次は試運転です。 |
15:1になった件ですが、明らかに太陽ギヤが1回転する間に「コマ飛び」(山飛び?)をおこしています。これは惑星ギヤの方にも3ミリの真鍮パイプを入れて太陽ギヤと同じ太さになれば解消すると思われます。
|
林メカトロ工作支援室
【トップページへ】
カクカク
【リンサーボ】
(2005.10.7より) 2005.10.12
予定と進行状態
カクカク
【リンサーボ】
(2005.10.7より 2005.10.12まで)
予定と進行状態
いよいよテストです(最終、そして1号機へ)
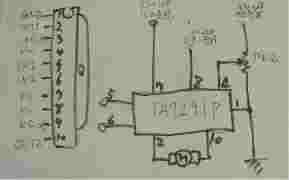  |
ついに真の「メカトロ工作」をする時がきました。今までは「メカ・メカ工作」ばっかりでした、上の写真はインターネットで見つけたTA7291Pです。適当にメモった図です。実は秋葉で安かったのでいっぱい買っておいたのです。で、4番ピンに注目しました。PICの工作入門雑誌やインターネットホームページで探しましたが4番ピンの事は「くわえる電圧によって出力電圧が変わる」とか「普段はモーター電源の+につないでおく・・・」程度しか載っていませんでした。(ちゃんと探せばあるかもですが)
そこでまず4番ピンの機能確認です。まず出力電源につないでいた+をはずしました。試しに電源ONしたら「あら 動く?」、オープンでも何ともないのかしら?。(オープンにしちゃあいけないってどこかで読んだような気がする、ノイズ拾うからか?)
|

|
| そこで試しにグランドに落としてみました。「回転が止まりました」、惰性が少しあります。(ブレーキがかかってないと言うこと、これ大事)乾電池で6ボルトにつないでみました。明らかにスピードが落ちてます。(モーター電源12ボルト)
1.5ボルトでもユルユル動きます。「なるほどー」こうやって使うのか。 |
 |
そこで早速4番ピンからリード線を引き出します。写真左側黄色の線がそうです。(この基板には2セット分あります)黒いのはグランドです。(あと影)
|
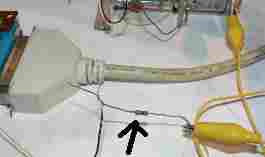 |
遠心スイッチはB接点です。回転が上がったらモーター電源をカットするわけですから普段は「"
H "」、回転が上がれば「" L "」にする、回転が落ちたらまた「"
H "」にする、ということは「プルダウン」しておいて遠心スイッチから+をかけておけば良いことになります。矢印がプルダウン抵抗です。(回転が落ちれば+がつながる、んで加速するっと)
ひどいバラック配線ですが、実験だし気がせくのでご勘弁。(用語の意味をご存じ無い方は参考書かその道のホームページでお願いします)
|
初号機実験風景
 |
プリンタポートから単発パルス出力、遠心スイッチを使えば1秒間1回転ぐらい、通さなければ大体
0.2秒で1回転しました。
遠心スイッチで直接モーターONOFFしますと「火花は飛ぶわノイズでるわ接点焼けるわ」ですが、4番ピンで制御すれば問題なしです。これもある種のPWM制御かなぁ、ま、いちいちブレーキがかかるモードも回避出来たし、プルダウンのところでバイアス電圧を適当にかければよりなめらかなフィードバックになるヤモです。しかし30年前には考えられない回路だ。(直流回路は凄く苦労した)
|
まあ私のメカトロってこの程度、カクカク・リンサーボ終わりの始まり。
(TA7291PのほかにもドライバICはいっぱいあります) |