10ページ
2003.6.9
【ハイブリッドガバナー2】
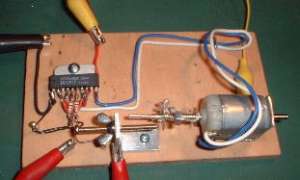
少し本格的に実験してみました。まず「マブチモーター」のシャフトの位置をずらしました。普通出力軸は10ミリほどです。反対側は1ミリほど出ています。そこで10ミリの方を4.5ミリほど引っ込めますと丁度両方とも5.5ミリ程度の両軸になります。
この作業、大した工具は必要ありませんが「なかなか難しいです」、まずモーターを分解するのに手こずると思います。私は初めて分解したとき「左親指の骨」に思い切り「ケガキ針」を突き立ててしまいました。治るのに3週間ほどかかりました。模型用マブチモーターと民生用はえらいちがいです。(でも大丈夫です。完璧な手順を考案しましたので)
なぜこんな加工をするかといいますと「カッコイイ」からです。嘘です。反対側にも軸が出ていた方が後々都合がいいからです。今回は必要なかったのですが、練習の為やってみました。
ところで今回から「モータードライバIC」を使います。この辺の技術は「滅茶苦茶ノウハウ」がインターネットのホームページにありますし、私は「猿まね」が専門なので割愛します。良く分からなくても私に質問しないでください。(私は知ったかぶり)


左から「低速」(1秒間10回転ぐらい)「中速」(同じく50回転ぐらい)「高速」(同じく100回転ぐらい)の写真です。蝶ネジ付きのビスの位置で回転が変わります。中速・高速は実に良い感じでした、低速は「脈動」します。色々原因を考えてしまいました。
原因ですけど、低速の場合はフル電圧だと「行き過ぎ」にあると思います。ま、大した問題じゃないです。それより「超低速」では「脈動」ですが「パワー」は本物です。「スリット付き円盤」を付け、「光学センサ」を付けてカウントすれば即実用ですね。
ちょっと時間がないので、次は「ハイブリッドガバナー3」か、いきなり「足の裏」作成に入りたいと思います。
ところで「メカトロ」の「トロ」の部分ですが、この分野「滅茶苦茶」プロの方がいらっしゃるので「私には質問しないでください」お願いします。
私は「オームの法則」がやっとです。
【ハイブリッドガバナーの実験】 2003.6.4 より 機械・電気・電子式速度制御の一例。
なんかカッコイイ名前を付けてしまいましたが、名前を先に付けたんです。「複合速度調節器」みたいな感じです。回転体の速度調節法は色々あります。ここでは「直流モーター」で考えてみます。
ジェームスワットの開発した蒸気機関には速度調節装置として「ガバナー」が付いていた・・・というか発明したみたいです。(ここのところよくわかりません)「調速機」と訳されていたような気がします。どうも小学校時代の伝記物程度の知識で申し訳ありません。
直流モーターの速度制御の方法はPWM?とか逆起電力利用法とか光電装置による回転数検知とかやたらにありますが、ヘタをするとモーターの容積より制御回路が大きくなったりします。又技術も私の及ぶところではありません、そこでちょっとレトロな感じがする「ガバナー」に付加価値を付けてみました。
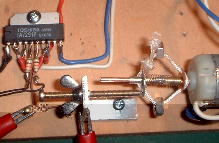
作ったのはこんなのです。

どうにもチャチですが、3ミリの真鍮丸棒に銅板製の円盤を2種類作って半田付けし、押しバネと凧糸・ナット2個で作りました。回すと遠心力でナットが投げ出され、凧糸を引っ張って右の円盤がスプリングに逆らって左へ「近づく」という寸法です。分速何回転でどのくらいとか全くわかりませんのですべていい加減です。(凧糸を通す穴は「ポチッとなヤットコ」であけました。超簡単 !! )

例によってボール盤を横倒しにし、セットしたところです。
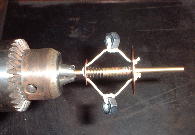
停止しているように見えますが、分速1200回転ぐらいでまわっています。
このボール盤は最高速度2700回転です。さてここからが本実験です。右側の大きな円盤は「回転が上がる」につれ「左の方に」移動します。そこでこれを「接点」としてON・OFFしたらどうなるか?、です。

ちょっとわかりづらいですが3ミリのシャフトに接点を接触させ給電します。(一応セロテープで絶縁したんですがあとでえらいことに)ボール盤のスイッチをONにし、右側の大きな円盤に接点(この場合ワニ口クリップ)を接触させるとボール盤は回り始めます。するとクリップの位置により「回転・停止、というか有電圧・無電圧」が繰り返されるはず・です。(クリップの先端はかなり焦げてしまった、100ボルトだもんね)



この3枚の写真とも回っています。左から低速・中速・高速(ボール盤は最高速回転のところにベルト掛け)になりました。写っていませんが「滅茶苦茶火花」がとんでます。交流100ボルトでやっています。このあと写真撮るとき思い切り「感電」しました。(@_@)真似する方はいらっしゃらないと思いますが十分お気をつけ下さい。(というより真似しないでくださいチャック締めすぎて絶縁破れたらしい)
実験は大成功でした。 (と、思う)
おおっ、自動速度調節だ!!、(手でやってんですけどね)なめらかに速度が変化します。ちょっと感激。
んで、何が言いたいかと言いますと、「通電中」は100パーセントパワーがかかっています。(当たり前)接点が切れればOFFになります。(これも当たり前)と・言うことは「仕事してるときは全力」ということです。しかも原始的な「フイードバック」が掛かっている・・・と言えます。交流100ボルト直接では火花が飛んでしょうがありませんが「マブチモーター」とかでしたら「TA7291」等を使えばそんなこともなくなるし、いいかも。(制御無しのPWM制御?・・・とちょっと違うのわかりましたぁー)
つまり低速回転でも「モーターはフルパワー」なのです。これは使えると思います。勝手にPWM制御と言うわけです。(暇なときオシロで見てみます。理想的なフイードバックがかかってるような気がするんですけどどうでしょう)それから結線の仕方で「無制限接続」とかも出来て面白いと思います。
回路組めばそれで良いのですが、この機械式接点ならばかなり安く(ほとんどタダ同然)速度制御出来ること請け合いです。今日は病院で目の精密検査もあり、帰ってから仕事にならないのでちょっと遊んでみました。
2003.6.4 記
2003.6.5 ちょっと加筆
ガバナーというのは初めてなので「大きさ・重さ」等良くわかりませんでしたので、今回はいいかげんに作りました。近い内実際にマブチモーターに組み込んでみます。時間制御の「ロボットアーム」とかに応用すれば少しはましな物に改造出来ると思います。(私はずいぶん買った・頭にきた、物をつかめば遅くなる、電池が消耗しても遅くなる、ウインドウズで制御する意味があるのかっ と私は言いたい、教育現場に使える物が欲しいぞー)(>_<)
【ポチッとなヤットコ】 1.6ミリ と 2.0ミリ のパンチャー作りませんか。(何に使うかお楽しみ)
前に「ポチッとなペンチ」をやりましたが、2ミリ以下ならヤットコ(矢床)でもいいんじゃないかなと思いまして作ってみました。1.6ミリ用と2.0ミリです。パンチビットの取り付けは「溶接型」と「ネジ止め型」の二種類です。溶接機をお持ちでなくても制作出来ます。

なんだかちょっとボケましたが、上が溶接(ボール盤式スポット溶接)で下がネジ止めです。
【ネジ止め式の作り方】
ボール盤・ベビーサンダー・3ミリと6ミリのタップ工具が必要です。まずヤットコの片方のアゴに5.2ミリの穴をあけ、6*1.0タップを立てます。6ミリのボルトを思い切りねじ込み、余分なところはカットします。次ぎにボルトの中心から2ミリ(打ち抜き穴が2ミリの場合)のキリサキでヤットコ全体貫きます。
ボルトの頭の横っ面(スパナを当てるとこ)から横に2.6ミリの穴をあけ、3*0.5ミリのタップを立てます。
先ほど使った2.0ミリのキリサキの根本の方を削り、「エッジ」を立てます。そしてヤットコに突っ込み、3ミリの「ホーローセット」(沈みネジとかイモネジとかとも言います)2本で左右から2ミリのキリサキを固定します。終わり。
(実はここでキリサキの横っ腹を削り、ずれない工夫が必要です)

こんな説明じゃダメですか?、片手間にやってるもんでこんなんで勘弁してください、「バカヤローっ ちっともわからねーよーっ」という方はメール下さい、きちんと対応させていただきます。<(_
_)>

こんなのとか簡単に出来ます。
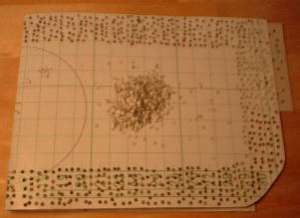
どのくらい持つか1000ヶ所あけてみました。
これは工作用紙です。この紙は刃物泣かせです。500ヶ所目で556塗りました。
で、なんの役に立つかといいますと、薄い銅板とか真鍮板・アルミ板等に綺麗な小さい穴をあけることが出来ます。それだけです。「接点」とか作るとき役に立つと思うのですが、作らない人には・・・。
タップの下穴に 「2.6ミリ」 だの 「5.2ミリ」 だのと書きましたが、「おかしいんじゃないの?」と思われると思います。「タップをバキバキ折ってもかまわない人」は正規の穴でやって下さい、私は「ズル」専門。
2003.5.30 記
どうしても自作減速機を作りたいシリーズの最終回です。遊星ギアモドキ減速機で「4Kg・10mm/秒」を達成しましたが、2段にしたらどうなるかを試したくて作ってみました。

こんなのです。ちょっと出力軸が狂っていますが「どうって事ない」のです。軸方向にガタがなければ「結果オーライ」ですから。

電池ドリル(12V)のバッテリーで30分ほどブンブン回してみました。出力軸は1秒間4回転ほどでした、1段の時は4Kg・10ミリ秒でした、今回2段目で6倍ぐらい出ているはずです。出力軸をペンチで思いっきり挟んだら「ネジ」がなくなってしまいました。当然止まりません、10㎏は出ていると思いますが秒速2ミリでは使い物にならないかも。

軽く分解したところです。

全て分解したところです。モーターが90円、ボルトが1本20円します。一式230円ぐらいでしょうか、ところで「網戸の押さえゴム」は30分の連続運転で全く変形とかありませんでした、又、「半田付け」の部分も異常無しでした。
これで「超安価動力系」は4種類出来ましたので、あとはいよいよ機体の設計ですね。(制御系は先送り)
2003.5.30 記