【差動減速機構】
2005.8.13
【関節を動かす装置 06】
【差動減速機構】
2005.8.13
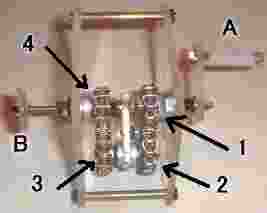
| 別に私が考案した物ではありません、昔から知られている減速機構を割と身近な物(私にとっては)でホビー的に作り上げた評価モデルです。 Aが入力ハンドル、Bが出力軸になります。1が歯数11の固定スプロケットです。右側のブラケットに固定されています。同軸で入力軸が入っており、番号付けるの忘れましたが中央のクランクを回します。クランクの先には歯数10のスプロケット2と3が付いてます。この2と3は軸でつながり同時に回転します。4は歯数10のスプロケットで出力軸Bと一体で左のブラケットと回り対偶になっています。 ハンドルAを回転させると、2と3のスプロケットがクランクとともに円運動します。その時1の固定スプロケットとラダーチェーンで結合している2は1の11Tと2の10Tの差の分だけ差動します。この差動分はそのまま3に受け継がれ、更に別のラダーチェーンにより4に受け継がれます。今Aを1回転させることによってBは差動分10分の1回転し、結果10対1の減速を得ます。、なお回転方向は「この構成の場合」反転します。 とまあ病院の待合室であまりの暇な時間にボーっと考えていた内容です。今日休みなので朝から作っていました。テレビ見たり昼寝したりしながらなので(旅行で女房いないから)えらく時間がかかりました。デジカメが戻ってこないので古いので撮影しましたのでちょっと見づらいかもです。(えっ 変わらないって?というのはナシ) |


| チャンと動くか予備実験(ンな大げさな物でもないけど)した「クルクル」です。ラダーチェーンの長さがピッチ1個分ずれるので、それを解消するための「テンションローラー」の構造がなかなか浮かばず焦りました。 |



| クランク部分は6回も作り直すハメになりました。原因は「ラダーチェーンスプロケット」が手作りだからだと思います。多分歯の部分が「微妙」に寸法が違うため、 1:1 なら問題にならなくても、このような組み合わせになると、色々と弊害が出るのだと思います。 |

モデルとしては一応完成、かな?。
| あっさり作っているように感じるとお思いでしょうが大変なんですヨー、とくに「上手くいくかどうか分からない」物を作っている時がものすごいストレスです。完成したらそのストレスがなくなるかというととんでもない、新たなストレスが発生します。工作のどこが楽しいんだか。(アタシは本当は人が作ったのを見るのがスキッ) ラダーチェーンでやりましたが、平歯車の方がはるかに簡単に出来そうです。ただし1個違いの歯車が手に入ればの話です。それからラダーチェーンではなく「ローラーチェーン」(自転車やオートバイの)の方が力の強い物が出来そうですが、かなり大きくなってしまうのが難点でしょうか、もっとも「25番」のローラーチェーンなら同じぐらいで出来るかも。(でも金かかる) |
|
林メカトロ工作支援室 【トップページへ】 |
【関節を動かす装置 07】
「傘摩擦車は使えるか?」
2005.8.14

| カサ歯車という歯車があります。車の「デファレンシャルギヤ」に使われています。ロボット関係ではTekuRoboさんがすんごいのを作っていらっしゃいます。(カサ・傘・笠?どの字だか忘れてしまった、たしか正式にはカサバハグルマと言ったような?) ホビー的には小さな物でも自作は困難です。ただし摩擦車なら簡単です。でもその分使い物にならない・・・、しかしモーター軸から直の段階ではどうかな?と実験してみました。目的は2つです。①軸の伝達方向を直角に変えたい、②モーターを複数配置出来ないか?、です。①は装置をうすべったくしたいナーで、②は勿論トルクを上げたいナーと言うことです。問題はオモチャとしても実用になるかどうかです。 |

| モーターは結束バンドと輪ゴムで止めています。回転数はあってもトルクが小さいなら「しっかり」止める必要なんて無いかナーと思いまして。 大きい方はベニヤ製です。モーター軸の方はオモチャのゴムタイヤをある程度刻んで軸に押し込んだあと、モーターを回転させながらサンダーで円錐になるように削りました。最初プラスチックで作ったのですが、すべって使い物になりませんでした、その時「ベルトワックス」を少し塗ったので、その後ゴムにしたら汚くなってしまいました。あまり強く押しつけなくともスリップすることなく回転が伝わります。つまり「カサ摩擦車」は一段目に限り十分使えます。(2005.8.15 加筆) |

| つまりこんな具合にトルクが足りない場合はモーターを簡単に追加出来るのでは?と思ったのです。投入する場所はやっぱり「初段」でしょう。 |


| ところで中間の部分ですが、作っている内だんだん様になってきました。失敗を学習してチャンとV字溝にしたのは勿論、スプロケットとの融合もスッキリしてきました。(真鍮釘のハンダ付け部分です) |

ドキドキの通電の瞬間。


| 矢印が最終出力軸です。モーターを横置きにする事によって、ここまでの減速機構は厚さ30ミリ以下になりました。関節駆動システムとして厚さより全体の大きさの方が問題と思われるかもしれませんが、(サーボモーターに比べたら話しにならない?)なーに、場所によります。 ところで結果ですが、十分使える感じがします。それと実験していて気が付いたのですが、モーターの取り付け位置を前後すると多少減速比が変えられることが分かりました。これって後で結構重宝するのでは。 |