| �у��J�g���H��x���� �y�g�b�v�y�[�W�ցz
�y�߂������u�@�O�P�z
|
| �у��J�g���H��x���� �y�g�b�v�y�[�W�ցz
�y�߂������u�@�O�P�z
|
�у��J�g���H��x����
�y�g�b�v�y�[�W�ցz
�y�߂������u�@�O�Q�z
�o���邾�������������͋����ȒP�ɁB(�ґ� !! )
2005.8.9

| �@�o���邾�������������͋����ȒP�ɁE�E�E�ƁA������Ɨ~����ȖڕW���f���ĕ��i��������Ă݂܂��B�܂��͂V�T�~���v�[���[�ƃ��_�[�`�F�[���X�v���P�b�g�̍��̕��i�ł��B����ł͂R�~���̃r�X�Ƀi�b�g���߂ł������A�ܘ_����Ȍ����ł́u����Łv���傤������܂���A���������a�͂R�~���̂܂܂ł�肽���̂ŐF�X�l���Ă݂܂����B�ł����Č��_�͐^�J�B�ɂ��u���x�b�g�~�߁v�̂悤�ȕ����ɂ��܂��B�@ |
 �@
�@ �@
�@
| �@��肠�����V�X�~���̃x�j���~�Ղ��o���܂��B�ŁA�a���@��̂ɑO���菭���܂��ȃo�C�g������Ă݂܂����B���͖��\�H�����g���Ă����ƊȒP�ɂ��ꂢ�ȍa���@����@������܂��B��������Ɖɂ��Ȃ��̂ŋ߂����ɂ��܂��B |
 �@
�@ �@
�@

| �@�x�j���~�ՂƃX�v���P�b�g���r�X�~�߂��A 1.5�~���̃L���T�L(�^�J�B�̑���)�łR���ђʌ��������܂��B�����ĊԂɃX�y�[�T�[(�v�����g��p)������őg�ݗ��Ă܂��B���A�Y��܂����B�^�J�ŕ����b�V���̂悤�ȕ��𗠂ɓ��ĂĂ����܂��B |

�ł����Đ^�J�B�Ɛ^�J�����b�V���𗠂Ńn���_�t�����܂��B

�]���ȓB������ă��X���|�����A�����ł��B
(�փS����������Ƃ��낪�L���Ȃ�A���L�փS�����g���܂�)

����́A�܂�����ł��B�g�����͂������肾�Ǝv���܂��B
| �@���̉��H�ɂ��A����i�������������ŁA�\����v�Ȓ��ԓ`�����i���o���܂����B���ɑދ��ȉ��H�ł����A�H����Ă���Ȏ��̌J��Ԃ��ł����炵�傤������܂���A�ł���x�������Ǝ�����͊ȒP�ɂȂ�܂��B���̕��i���t�@�[�X�g�Ȃ玟�́u�Z�J���h�`�����i�v�ł��B |
�у��J�g���H��x����
�y�g�b�v�y�[�W�ցz
�y�߂������u�@�O3�z
(�X�v���P�b�g�̃{�X�Ɗ������V���t�g)
| �@30T�̃X�v���P�b�g�ƍŏI�i���C���[�h����(���a�U�~��)�ɂ͐��s�̒��͂�������u�Ԃ���������Ǝv����̂ŁA���̌��������S�ɂ��Ȃ���Ȃ�܂���A��̉��ō��Ȃ����Ƃ�����܂����Չ��H������܂��̂ł���͎~�߂āu�Ѓ{�X���H�v�Ɓu�z�[���[�Z�b�g�v�ł��܂��B |
 �@
�@ �@
�@
| �@�܂��̓{�X�ɂȂ镔���ł��B���݂͂U�~���͗~�����ł��B�A�N�����̏����Ȃǂŗǂ��̂ł����A�莝�����Ȃ��̂ŕ��S�ł��܂����B��ɂ���ăz�[���\�[�ŕ����b�V���̐e�ʂ݂����ȉ~�Ղ����蔲���܂��B������{�[���Ճo�C�X�ɋ���(���������Ȃ��悤�ɉ��ɉ��M����������ł���)�L���T�L�Ō��������܂��B�����̓Z�I���[�ʂ�S�T�x�͂Ȃꂽ�Ƃ���ɂ����������܂��B�����ă^�b�v�𗧂Ă܂��B(�r�X�������Ă���̂͌��̈ʒu���킩��₷�����Ă��邾���ŁA�g���킯�ł͂���܂���) �@�L���T�L�ł����錊�̌��ł����A 3*0.5�~���l�W�Ȃ̂� 2.5�~���L���T�L�ł�����E�E�E�ƁA���Ȃ荂���m���Ń^�b�v��܂�܂��B�ܘ_�u�r�@���@�d�グ�v�Ə��Ԃɂ���������Ă����Α��v���Ǝv���܂����A�u����ȕ��i�ɂ���Ȏ�����Ă������v�Ƃ������ƂŁA�����ł�2.6�~���� 2.7�~���ł����܂��B�s���S�l�W�ɂȂ�܂����z�[���[�Z�b�g���g���̂ŐS�z����܂���A���R�́u���x�v�̖��ł��B(�ʃR�[�i�[�ł��̕ӂ̂Ƃ����) |

�����ƎB��������ł������Â��Ȃ�܂����B�X�v���P�b�g�ƃ{�X�����������邽�߂�
�R���̌��������Ă���Ƃ���ł��B���S�͌������K�C�h����ł��B
 �@
�@
| �@�\���Ɨ����ł��B�Ƃ��ɍ�����r�X�A�E���M�r�X�Ŏ~�߂��Ƃ���ł��B�o������Ȃ����M�r�X�̕����g���₷�����ł����B |

| �@���������Ă��� 30T�̐^�J���Ѓ{�X���_�[�`�F�[���X�v���P�b�g�ł��B�S�O�O��������܂��B�E�������������łP�T�O�����ł����A�{�X�̕������A�N�����ō��T�O�������炢�ŏo����Ǝv���܂��B |
|
�у��J�g���H��x���� �y�g�b�v�y�[�W�ցz |
�y�߂������u�@�O�S�z
(���Ƃ����p�ɋ߂Â��Ă������|�C)

| �@�}�u�`���[�^�[����փS���Ŗ� 4:1 �������畝�L�փS���� 25:1 �����`�F�[���� 3:1 �ŁA�v�U�~���̃��C���[�h�����܂� 300:1 �ł��B��̂R�b�łP��]�ɂȂ�܂����B�U�~���̃��C���[�h�������v���C���[�łЂ����݁A�U�T�~���̂Ƃ���ɂT�O�O�O�����̏d����Ԃ牺�����牽�Ƃ������オ��܂����B���ƈ�i�c���Ă���̂Ńg���N�͂��Ȃ�o�Ă��邩���H�B |
 �@
�@ �@
�@
| �@���ʐ^�����̂V�T�~���̃v�[���[�ł����A�փS�����������L�������̂ōa���(�e�[�v���R�[�_�[���̗v�̂�)������炱�ꂪ�厸�s�A���ɏ��オ���ĊO��Ă��܂��܂��B�����͂�͂� V�a�łȂ��Ă̓_���ł��B���ꂩ�璆���̎ʐ^�Ԗ��(��v�[���[��)�̃l�W�ƁA�ŏI�i���t���{���g(�����)�̎������ɂ��l���Ă��Ȃ������̂ŋ������Ă��܂��܂����B(���ׂ̈��̌����@�͊������Ă��Ȃ�) |
 �@
�@ �@
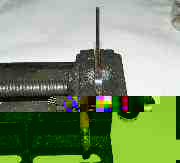
�@![]() �@
�@
| �@A�͕��ʂ̗փS���Ə������L�̗փS���ł��BB�́u�o���R�[�h�v�ł��B���a�Q�~���ł����A�����ƍׂ��������邩�ǂ������x�����Ă݂܂��B�Ȃ�قǁAV�̕����ɐH�����܂Ȃ���X���b�v����͓̂�����O�����A�x���g���^�C�R�ɏ��オ��̂͏펯�ł����A�փS�����Ǝv���Ă�����ƃo�J�ɂ��Ă������A���ȁB(�Ԗ���V�a�A�����͓K���ɕ���ɍa���@������) |
|
�у��J�g���H��x���� �y�g�b�v�y�[�W�ցz |
�y�߂������u�@�O5�z
�y���������@�\�z
| �@�u���J�j�Y�����T�v�Ƃ����{�̒��Ɂu���������@�\�v�Ƃ������ڂ�����܂��B��Ⴂ�̎��Ԃ̑g�ݍ��킹�Ő����P�Ȃ�Ă����Ƃ�ł��Ȃ������@���Љ��Ă��܂��B����������܂���ɂ��������ɂȂ��̂ŋL���̕Ћ��ɉ�������Ă����̂ł����A����a�@�̑ҍ����ŗ�̂��Ƃ��{�[�[�[���Ƃ��Ă�����ˑR�Ђ�߂��܂����B �@�u��Ⴂ�̎��Ԑ���Ȃ�Ă���Ă��������v�Ǝv���Ă����̂ł����A�u���_�[�`�F�[���X�v���P�b�g�Ȃ�ǂ����낤�v�Ǝv�������̂ł��B���Ԃ̑g�ݍ��킹�̂悤�ɔ���Ȍ�����͖����ł��u���������Ȃ�H�v�A�ƁB �@�����Ŗ{���A��̖��\�H���{�Ȃ炢�؍�Ճ��[�h�� 10T��11T�̃X�v���P�b�g�𐔌��܂��Đ�قǂ܂Łu�N���N���v�ėV��ł���܂����B�u�ԈႢ�Ȃ� !! �v 10T��11T�̑g�ݍ��킹�� 10:1 �� 11:1 �̌�����ɂȂ�܂��B(�g�ݍ��킹���ɂ��)������u�g�������@�v�̂悤�ɐ����ȉ��H�łȂ��Ƃ������Ȃ�u���ݍ����v�ɖ��Ȃ��ł��B �@�I�}�P�ɕ����Ԃ̂��ݍ����̂悤�Ɏ��� 1:1 �̑Ή��ł͂Ȃ�����(180�x)�͏�ɂ��ݍ����Ă��܂��B����͂ǂ����������Ƃ����܂��Ɓu�`�B���������ԂƂ͔�ו��ɂȂ�Ȃ����炢�ǂ��v�Ƃ������Ƃł��B�ʐ^�ł������������Ƃ���ł����A���[�����s�Ƀf�W�J�������čs����������̂ŋA���Ă��Ă���ł��B �@���āA 10T ���R�A 11T ���P�̌v�S�̑g�ݍ��킹�ł��B�u��������ψ���v�ł͂���܂��u�ǂ������g�ݍ��킹���ł��傤���v�A�̓f�W�J�����߂��Ă��Ă���ł��B�����Ԃ��͂邩�ɍ������������ҏo���邱�̍��������͈�x����Ă݂鉿�l������܂��B�����������v�̒��j�ƒZ�j�� 12:1 ���ȒP�ɐ���(�����o��)�o���܂��B���ꂩ��u�����Ձv�ɂ��Ȃ�܂��ˁB(�ܘ_���{�b�g�̒��Ԍ����@�\�ɍœK�ł�) |

 �@
�@
 �@
�@ �@
�@