【打撃折り曲げ】②

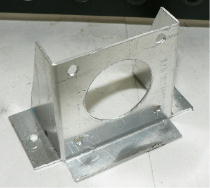
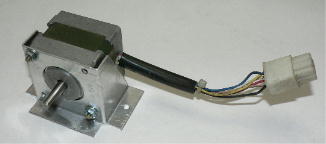
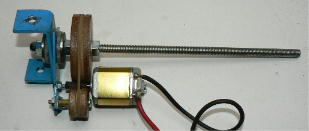
マブチモーターマウント、実にありふれた形。
|
| 試しにこういうのを作ります。こんなの作らなくても市販のセットでありますが、(それもカッコイイ奴が)自作にはそれなりの達成感があります。 |
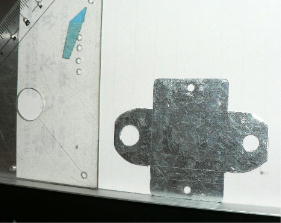  |
常設ケガキ台でケガいて穴をあけ、切り取りました。今回の工作ではこの穴あけの方が難しいかもしれません、この穴あけは過去にやってます。
この程度の折り曲げなら、なにも治具など使わなくても曲げられます。右の写真のように(暗いけど)幅広ヤットコ一丁で出来てしまいます。しかし今回の板は厚さ
0.6ミリの鉄板(トタン板)ですので、きれいな内側直角には曲がりません、別に内側直角に曲げる必要はないのですが、ケガキ線に沿っての折り曲げとか、先にあけた穴の位置を狂わせないためにも今回の治具を使う価値はあります。 |
  |
| ところで打撃で曲げるとき、あてがった矢板が飛び跳ねたりして続けて打撃を加えるときに注意が必要です。このように布テープを貼り、折り曲げ線に沿ってカッターでテープを切り、矢板をその線になじませておくと、テープの糊の働きもあり、比較的安定します。 |
  |
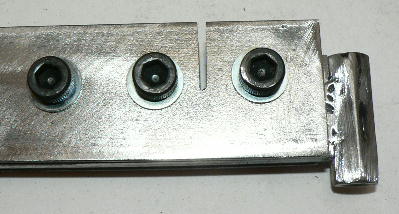
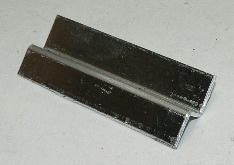
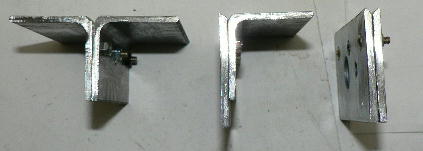
| V溝の中心に合わせて叩きます。3回ぐらいで直角ぐらいに曲がりました。ところで昨日3種類作りましたが、実際は右の写真の「平鉄合わせ治具」だけで事足ります。ただなれないと使いづらいので試しに作っただけです。 |
ここで問題発生。
 |
| 曲げる順番を間違えてしまいました、メインイベントである逆曲げが出来なくなってしまいました。(>_<)今日はもう時間がありません、仕方がないので幅広ヤットコその他で「姑息曲げ」をやっちゃいました。 |
 |
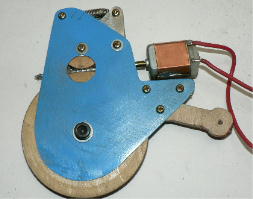
| 見た目良さそうに見えますが、(勿論問題なく使える)私の基準では失敗作です。強度を作り出す為の逆曲げ部分が緩慢に曲がっています。商品だったら完璧不良品で返品物です。 |
まぁいいや、明日があるさ(無かったりして)。
  |
| このマウントは模型工作的に考えた物でロボットには使えません、いわゆる一つの練習と言うことで(と、ごまかす) |